

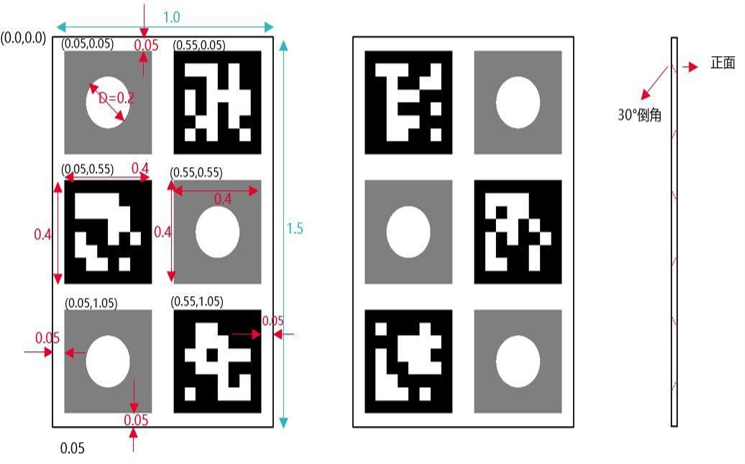
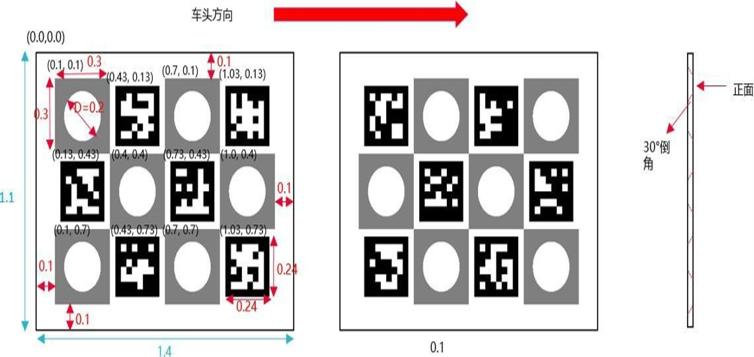
标定板表面加工出相机标定实验的棋盘格,能够较为精确地产生视 觉系统测量的特征点,即棋盘格的角点:在标定板的黑色区域镂空圆孔, 圆孔与黑色正方形同中心,3d激光雷达通过扫描镂空区域特征,计算圆
孔中心点三维坐标作为激光测量系统的特征点。此方法能够便捷和准 确地实现两种传感器在一次标定实验中同时完成数据采集。将 3d 激 光雷达获取的圆孔中心点三维坐标利用式(4)转化为相机坐标系下的三 维坐标,即可确定联合测量系统下角点和中心点的测量距离;与其在标 定板上的理论距离进行比较可求得联合测量误差,通过非线性优化联 合测量误差解得两种传感器之间的旋转矩阵r和平移向量t,实现对视觉 系统和激光系统的联合标定。
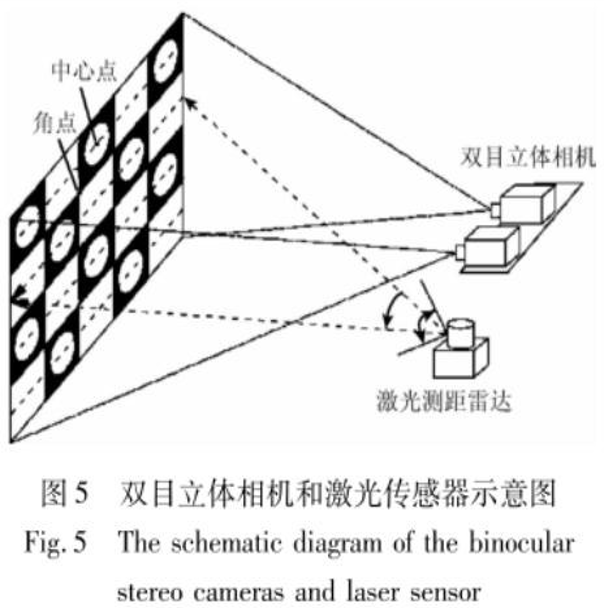
联合标定板
2联合标定流程
本文的联合标定算法具体步骤如下:
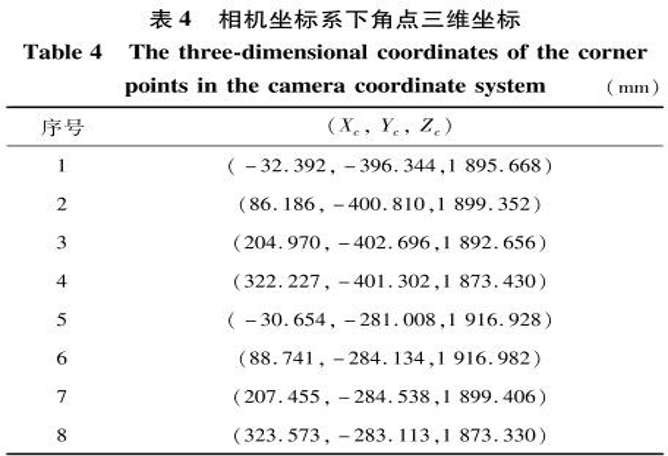
采用张氏标定[16]获得立体相机的内外参数,通过采集棋盘格标定板图 像,将棋盘格角点作为视觉系统的特征点,提取角点的二维像素坐标,按 照双目视觉算法还原角点在相机坐标系下的三维坐标。
3d激光传感器系统经过自标定获得自身内外参数,通过扫描标定板镂空 圆孔区域,获取圆孔中心点在3d 激光测量系统坐标系下的三维坐标。将 中心点作为3d激光系统的特征点,为了建立两种传感器坐标系之间的联 系,需要将3d激光坐标系下中心点的三维坐标按照一定的关系转换到相机 坐标系下的三维坐标。
按照上述步骤,计算相机坐标系下角点和相对应中心点的实际测量距离, 最终通过最小化特两组征点之间的理论与实际测量距离的平方差,从而 获取两传感器坐标系之间的旋转矩阵和平移向量。
由联合标定基本式(4)可知,联合标定所求旋转矩阵r中未知量为关于旋转 角φ、0ψ的变量,因此r有3个未知参数,平移向量t有3个未知参数,因 此联合标定参数有6个未知量。具体优化求解过程如下:
联合标定流程
本文的联合标定算法具体步骤如下:
采用张氏标定[16]获得立体相机的内外参数,通过采集棋盘格标定板 图像,将棋盘格角点作为视觉系统的特征点,提取角点的二维像素坐标, 按照双目视觉算法还原角点在相机坐标系下的三维坐标。
3d激光传感器系统经过自标定获得自身内外参数,通过扫描标定板镂 空圆孔区域,获取圆孔中心点在3d 激光测量系统坐标系下的三维坐标。 将中心点作为3d激光系统的特征点,为了建立两种传感器坐标系之间 的联系,需要将3d激光坐标系下中心点的三维坐标按照一定的关系转换 到相机坐标系下的三维坐标。
按照上述步骤,计算相机坐标系下角点和相对应中心点的实际测量距 离,最终通过最小化特两组征点之间的理论与实际测量距离的平方差, 从而获取两传感器坐标系之间的旋转矩阵和平移向量。
由联合标定基本式(4)可知,联合标定所求旋转矩阵r中未知量为关于旋 转角φ、0ψ的变量,因此r有3个未知参数,平移向量t有3个未知参数, 因此联合标定参数有6个未知量。具体优化求解过程如下:
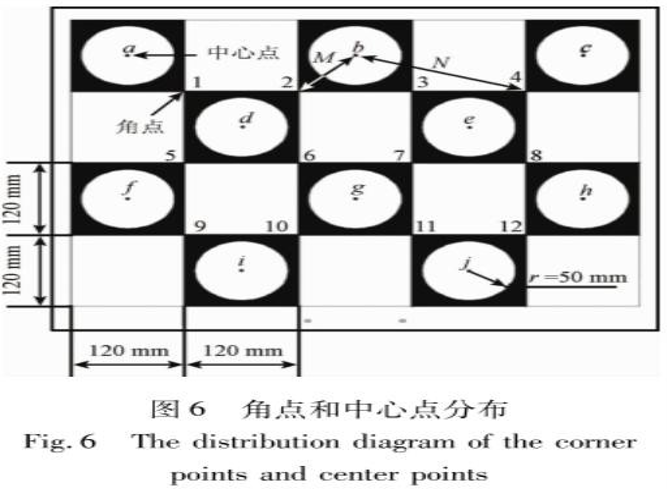
建立角点和中心点测量距离与理论距离误差关系如图6所示,根据角点 和中心点的分布,确定每个角点与相邻的3个中心点的实际测量距离与 理论距离之间的误差关系,建立对应的误差方程(8)。
e=|d'-dl (8)
式中:e为距离误差,d为实际测量距离,d为理论距离。
标定算法
通用目标靶
通用目标是用于驾驶员辅助系统校准传感器的几个目标的组合。使 用通用目标,激光雷达,雷达和照相机类型的传感器可以被校准。这 些传感器在目标上使用不同的图案来进行校准。通用目标被分为不同 的区域。附着图案的底板由雷达反射材料组成。激光雷达传感器的校 准图案附在顶部和底部。中间是校准的模式。
通用目标有三种用于激光雷达和照相机校准的模式,它们相对于车 轮对准站(wam csys)的坐标系安装在不同的高度上。
激光雷达的目标的顶部和底部在尺寸上是相同的。该图案由黑色和 明亮的正方形组成,每个边的长度为80毫米。深色的方块被分成三行 排列。每行有8个黑色的方块相邻放置。应确保形成中心的两个明亮 的方块也应设计为深色。在目标的中心是一个参考标记(见图7), 其中有一个十字准线和另一个十字准线,用于在车轮对准站中进行定 位和参考。

标定板固定支架
其中:10为支架底座,20为支架的支撑杆,30为支架的夹持机构,用 于安装或夹持标定板;标定板是一块长方形的平板。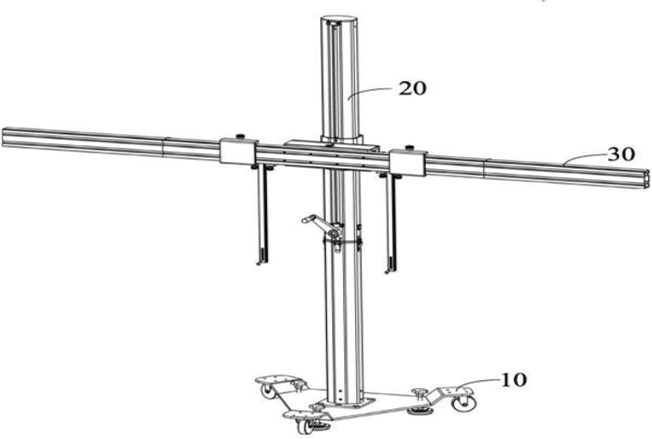
尺寸要求
1.标定支架夹持中心处的高度(20的高度)不低于1.5m;
2.30的夹持范围可调整,最大夹持尺寸不小于1.6m;
位置关系要求
1. 底座10和支撑杆20的垂直度<1°; 2. 20和30的垂直度<1°; 功 能要求
主支撑杆20是可拆分或可折叠形式,方便运输;
支架底座10,需带有轮子,且有可调水平的装置, 使用时要稳定,不 能 晃动;
支架可承重>20kg

